「メインページ」の版間の差分
細編集の要約なし |
(→投入軌道) |
||
| (2人の利用者による、間の77版が非表示) | |||
| 1行目: | 1行目: | ||
[[ファイル:DespatchFm_4.jpg|300px|right|thumb|ARTSAT2:DESPATCHのフライトモデル]] | [[ファイル:DespatchFm_4.jpg|300px|right|thumb|ARTSAT2:DESPATCHのフライトモデル]] | ||
本ページでは、ARTSATプロジェクトで開発中の第二の宇宙機「ARTSAT2: DESPATCH」のミッション、システム、および投入軌道について説明する。 | |||
DESPATCHのメインミッションである「共同受信ミッション」においては、世界各地のアマチュア無線家に協力していただくことで、宇宙機が深宇宙から送信したデータの復元に挑戦する。 | |||
[[共同受信ミッション| | 共同受信ミッションの詳細については、以下のページを参照のこと。 | ||
*[[共同受信ミッション|共同受信ミッションの詳細]] | |||
==ARTSATプロジェクト== | |||
ARTSATプロジェクト(芸術衛星プロジェクト)は、「宇宙と地球を結ぶメディア」としての宇宙機を使って、 | ARTSATプロジェクト(芸術衛星プロジェクト)は、「宇宙と地球を結ぶメディア」としての宇宙機を使って、 | ||
そこからインタラクティヴなメディア・アート作品やサウンド・アート作品など、 さまざまな芸術作品の制作を展開していくプロジェクトである。 | そこからインタラクティヴなメディア・アート作品やサウンド・アート作品など、 さまざまな芸術作品の制作を展開していくプロジェクトである。 | ||
プロジェクトは、 | プロジェクトは、 多摩美術大学と東京大学のコラボレーションを軸とした多くのメンバーによって進められている。 | ||
芸術利用を目的とした宇宙機の開発主体を東京大学チームが担当し、宇宙機からのデータを活用した作品制作や地上局の運用、およびデータ配信を多摩美術大学チームが担当している。 | |||
*[http://artsat.jp/ ARTSATプロジェクトのホームページ] | *[http://artsat.jp/ ARTSATプロジェクトのホームページ] | ||
*[https://www.facebook.com/artsat ARTSATプロジェクトのFacebookページ] | *[https://www.facebook.com/artsat ARTSATプロジェクトのFacebookページ] | ||
==ARTSAT2: DESPATCH== | ==ARTSAT2: DESPATCH== | ||
[[ファイル:DespatchEm_VibrationTest.jpg|360px|right|thumb|DESPATCH(実寸大の試作品)とその大きさ]] | |||
[[ファイル:DespatchEm_VibrationTest.jpg| | 深宇宙彫刻「ARTSAT2:DESPATCH」は、芸術衛星[http://artsat.jp/invader/ 「ARTSAT1:INVADER」]に続いて、ARTSATプロジェクトが開発する2番目の宇宙機である。 | ||
大きさ約50cm立方、重量約32kgのこの宇宙機は、 | |||
<span style="color:red">2014年12月3日 13時22分04秒(日本標準時)</span> | |||
[http://www.jaxa.jp/press/2014/ | に打ち上げ予定のJAXA H-ⅡAロケットF26号機により、小惑星探査機「はやぶさ2」の相乗りペイロードとして地球脱出軌道へと投入される。 | ||
*[http://www.jaxa.jp/press/2014/11/20141130_h2af26_j.html H-IIAロケット26号機による小惑星探査機「はやぶさ2」(Hayabusa2)の打上げ延期について] | |||
===ミッション=== | ===ミッション=== | ||
DESPATCHは、以下のような芸術ミッションと、技術ミッションを行う。 | DESPATCHは、以下のような芸術ミッションと、技術ミッションを行う。 | ||
| 38行目: | 38行目: | ||
なお、芸術ミッションの「宇宙生成詩」とは、宇宙機搭載のセンサーの値(温度など)をもとに宇宙機搭載の計算機が特定のアルゴリズムにもとづいて生成するものである。 | なお、芸術ミッションの「宇宙生成詩」とは、宇宙機搭載のセンサーの値(温度など)をもとに宇宙機搭載の計算機が特定のアルゴリズムにもとづいて生成するものである。 | ||
また、技術ミッションに挙げた「共同受信ミッション」では世界各地のアマチュア無線家に受信協力をいただくことで、宇宙生成詩の復元に挑戦する。 | また、技術ミッションに挙げた「共同受信ミッション」では世界各地のアマチュア無線家に受信協力をいただくことで、宇宙生成詩の復元に挑戦する。 | ||
宇宙生成詩および共同受信ミッションに関する詳細は、共同受信ミッションのページを参照のこと。 | |||
*[[共同受信ミッション|共同受信ミッションの詳細]] | |||
===特徴=== | ===特徴=== | ||
こうしたミッションを実現するために、DESPATCHは通常の宇宙機とは異なる、以下のような特徴を有している。 | |||
*宇宙機が電波を連続送信する期間は、地球脱出軌道に投入後、地球から約300万kmの距離に到達するまでの最大一週間とする | *宇宙機が電波を連続送信する期間は、地球脱出軌道に投入後、地球から約300万kmの距離に到達するまでの最大一週間とする | ||
| 48行目: | 48行目: | ||
*ペイロードが自律的に機能するため、通信はCWビーコンの送信のみとし地上からのコマンドアップリンクは行わない | *ペイロードが自律的に機能するため、通信はCWビーコンの送信のみとし地上からのコマンドアップリンクは行わない | ||
== | ==構造とデザイン== | ||
DESPATCHの構造は、大きく以下の3つの部分からなる。 | |||
*宇宙機全体を覆うような造形部(Sculpture) | |||
*データ処理用のOBCと通信機および1次電池を収納するアルミニウム製容器(Aluminum Cover) | |||
*造形部を支持しアンテナを据え付ける棒状部材(Support rod) | |||
===外観のデザイン=== | |||
構造系のうち造形部については、 | |||
ロシア・アヴァンギャルドの芸術家[http://ja.wikipedia.org/wiki/ウラジーミル・タトリン ウラジーミル・タトリン]が1919年に構想した「第三インターナショナル記念塔(The Monument to the Third International)」や、 | |||
[http://ja.wikipedia.org/wiki/ロバート・スミッソン ロバート・スミッソン]によるランドアートの先駆的な作品である「スパイラル・ジェティ(Spiral Jetty)」を参照・引用し、 | |||
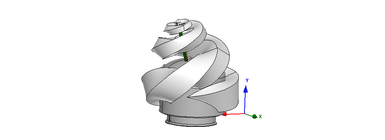
「螺旋」をモチーフに造形のスタディを行った。螺旋は芸術作品のみならず、生命や自然の中にも多く見られる普遍的な形である。いくつかの試行錯誤の結果、最終的な造形は、以下のような特長を持つ下図のものに決定した。 | |||
*視点の位置によってさまざまな表情の変化が生まれる | |||
*アルゴリズミックな形状とオーガニックな風合いを融合する | |||
造形部はCADでデザインされ3Dプリンタによりナイロンから出力されたものであり、重量はおよそ15kgと宇宙機の重量の約半分を占める。 | |||
3Dプリンタによる造形は、[https://www.solize-group.com/products/index.html SOLIZE株式会社]が担当した。 | |||
以下のページでは、DESPATCHの3Dモデルをドラッグ/スクロールで操作し、様々な角度から宇宙機の多様な外観をみることができる。 | |||
*[http://artsat.jp/project/despatch/3d-model DESPATCHの3Dビューワー] | |||
<gallery caption="CGによるDESPATCHの外観" widths="220px" heights="220" perrow="3"> | <gallery caption="CGによるDESPATCHの外観" widths="220px" heights="220" perrow="3"> | ||
ファイル:DespatchCgi_1.png | ファイル:DespatchCgi_1.png | ||
| 64行目: | 80行目: | ||
<!--ファイル:DespatchFm_2.jpg--> | <!--ファイル:DespatchFm_2.jpg--> | ||
</gallery> | </gallery> | ||
===構造設計と機器配置=== | |||
宇宙機の内部構造は下図に示すとおりである。 | |||
DESPATCHの構造設計においては、その外見だけではなく内部構造も美しく設計することを目標とした。 | |||
DESPATCHの構造は従来の宇宙機や衛星に多く見られるパネル・フレームの構造とは異なり、 | |||
中央のアルミニウム製支柱(Aluminum Keel)を大黒柱とした周方向に対称な構造(および機器配置)になっている。 | |||
このような周方向に対称な構造によって、振動や荷重に対する強度に方向性がない、工学的な観点からも非常に強い構造を実現している。 | |||
[[ファイル:InternalStructure.png|450px|thumb|left|DESPATCHの内部構造]] | |||
[[ファイル:CoordSystem.png|460px|thumb|none|DESPATCHの6面図]] | |||
造形部(Sculpture)の材質はナイロン12であるが、その強度は他の金属部品と比べると弱いため、 | |||
造形部とアルミニウム製容器(Aluminum Cover)は合計17本のボルトでとめられ力が分散する構造となっている。 | |||
アルミニウム製容器は基本的に曲面となっているが,そのボルト締結部においてはナットを平面で支えるために17箇所1つ1つに特殊加工によって平面が設けられている。 | |||
また、造形部を支える棒状部材(Support rod)は、打ち上げ時の振動やロケットからの分離衝撃に耐えうる荷重・振動特性等を考慮し、材料(GFRP)やその太さが選定されている。 | |||
この棒状部材は支持部材であると同時に、モノポールアンテナの取り付け場所としての役割を持つ。 | |||
これらの構造設計および製作は[http://www.yukiseimitsu.co.jp/ 株式会社由紀精密]に協力をいただいた。 | |||
==電気的な構成== | ==電気的な構成== | ||
[[File:BlockDiagram.png|420px|thumb|left|DESPATCHの機能ブロック図]] | |||
[[File:MainAndMorikawaBoards.JPG|520px|thumb|none| メインボードおよびミッションボード(MORIKAWA)]] | |||
==通信系== | ==通信系== | ||
DESPATCHのメインミッションである共同受信ミッションを成功させるためには、なるべく多くのアマチュア無線家の受信協力が必要となる。 | DESPATCHのメインミッションである共同受信ミッションを成功させるためには、なるべく多くのアマチュア無線家の受信協力が必要となる。 | ||
そこで、送信電波の周波数としては、アマチュア衛星で最も一般的に使用され、より局数の多い430MHz帯を採用している。 | |||
変調方式としては最もシンプルな方式であるCW(搬送波のオン/オフで、1ビットを表現)を採用し、 | 変調方式としては最もシンプルな方式であるCW(搬送波のオン/オフで、1ビットを表現)を採用し、 | ||
複雑な変調方式の電波を低出力で送るのではなく、できる限りシンプルな変調方式の電波をできる限り高出力で送ることによって受信の確実性を高めるという設計としている。 | 複雑な変調方式の電波を低出力で送るのではなく、できる限りシンプルな変調方式の電波をできる限り高出力で送ることによって受信の確実性を高めるという設計としている。 | ||
また、シンプルな変調方式を採用する副次的な効果として、なるべく多くの方に共同受信に参加していただけるようにするだけでなく、受信の際に各局で独自に工夫を凝らすことが比較的容易であるため、地上局の多様性を利用した異種冗長化を図れると考えている。 | |||
このような設計にしたがって、以下に示す諸元の送信機を宇宙機に搭載する。 | |||
この送信機は、[http://www.nishimusen.co.jp/eisei2013/eisei2013.htm 株式会社西無線研究所]によって設計・開発されたものである。 | |||
{|class="wikitable" style="width:50%" | {|class="wikitable" style="width:50%" | ||
| 101行目: | 129行目: | ||
|周波数安定度 || 最大 ±0.3ppm (±130 Hz) | |周波数安定度 || 最大 ±0.3ppm (±130 Hz) | ||
|} | |} | ||
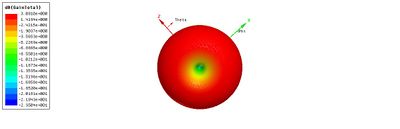
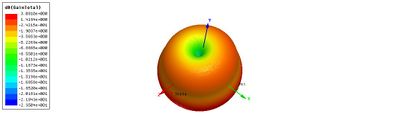
この送信機は宇宙機搭載のタイマーICと計算機によって駆動され、およそ7Wの送信電力がモノポールアンテナから放射される。 | この送信機は宇宙機搭載のタイマーICと計算機によって駆動され、およそ7Wの送信電力がモノポールアンテナから放射される。 | ||
シミュレーションによって求めたアンテナパターンを図に示す。 | シミュレーションによって求めたアンテナパターンを図に示す。 | ||
なお、このアンテナは、造形部の中心に配置されたGFRP製の棒状部材に取り付けられており、 | |||
棒状部材は造形部の先端と通信機等が格納されているアルミニウム製の容器とを接続している。 | |||
<gallery caption="DESPATCHのアンテナパターンおよびそれを規定する座標系" widths="400px" heights="140px" perrow="2"> | <gallery caption="DESPATCHのアンテナパターンおよびそれを規定する座標系" widths="400px" heights="140px" perrow="2"> | ||
| 114行目: | 141行目: | ||
ファイル:AntennaCoord.png | ファイル:AntennaCoord.png | ||
</gallery> | </gallery> | ||
== | 参考として、この送信系とARTSATプロジェクトの地上局での回線計算の結果を、以下のファイルに記載した。 | ||
*[http://artsat.jp/wp-content/uploads/2014/11/Despatch_LinkMargin_ver1.0.xls ARTSAT地上局における回線計算 ver1.0] | |||
なお、このCW送信機によって送信するデータの具体的な形式については、以下のページを参照されたい。 | |||
*[[共同受信ミッション|共同受信ミッションの詳細]] | |||
==投入軌道== | |||
DESPATCHは地球脱出軌道に投入され、ちょうど地球の横を並走するような人工小惑星となる。 | |||
その軌道は下図に示すとおりであり、打ち上げからおよそ1年ごとに地球に最接近する。 | |||
なお、図に示した緑色の軌道は、DESPATCHが相乗りする小惑星探査機はやぶさ2の目標天体(小惑星1999JU3)の軌道である。 | |||
[[ファイル:OrbitSim.png|370px|thumb|left|DESPATCHの軌道]] | |||
[[ファイル:Distance1year.png|370px|thumb|none|DESPATCHと地球との距離の推移]] | |||
地上から観測するとき、DESPATCHは他の惑星と同様に数時間かけてゆっくりと天球上を移動する。 | |||
以下のウェブページで、DESPATCHの現在位置を確認できる。 | |||
*[http://artsat.jp/project/despatch/orbit DESPATCHの軌道位置] | |||
*[http://artsat.jp/project/despatch/celestial DESPATCHの天球位置] | |||
==リンク== | |||
*ARTSATプロジェクト公式HP | |||
**http://artsat.jp | |||
*SNS | |||
**https://www.facebook.com/artsat | |||
**https://twitter.com/DESPATCH_ARTSAT | |||
**https://twitter.com/artsat_satoru | |||
*GitHub | |||
**https://github.com/artsat | |||
[[ファイル:Tatlin-Smithson-ARTSAT.png|1024px|thumb|none|タトリンースミッソンーARTSAT]] | |||
==連絡先== | |||
info@artsat.jp | |||
2015年5月24日 (日) 10:44時点における最新版

本ページでは、ARTSATプロジェクトで開発中の第二の宇宙機「ARTSAT2: DESPATCH」のミッション、システム、および投入軌道について説明する。
DESPATCHのメインミッションである「共同受信ミッション」においては、世界各地のアマチュア無線家に協力していただくことで、宇宙機が深宇宙から送信したデータの復元に挑戦する。 共同受信ミッションの詳細については、以下のページを参照のこと。
ARTSATプロジェクト
ARTSATプロジェクト(芸術衛星プロジェクト)は、「宇宙と地球を結ぶメディア」としての宇宙機を使って、 そこからインタラクティヴなメディア・アート作品やサウンド・アート作品など、 さまざまな芸術作品の制作を展開していくプロジェクトである。 プロジェクトは、 多摩美術大学と東京大学のコラボレーションを軸とした多くのメンバーによって進められている。 芸術利用を目的とした宇宙機の開発主体を東京大学チームが担当し、宇宙機からのデータを活用した作品制作や地上局の運用、およびデータ配信を多摩美術大学チームが担当している。
ARTSAT2: DESPATCH

深宇宙彫刻「ARTSAT2:DESPATCH」は、芸術衛星「ARTSAT1:INVADER」に続いて、ARTSATプロジェクトが開発する2番目の宇宙機である。 大きさ約50cm立方、重量約32kgのこの宇宙機は、 2014年12月3日 13時22分04秒(日本標準時) に打ち上げ予定のJAXA H-ⅡAロケットF26号機により、小惑星探査機「はやぶさ2」の相乗りペイロードとして地球脱出軌道へと投入される。
ミッション
DESPATCHは、以下のような芸術ミッションと、技術ミッションを行う。
- 芸術ミッション
- 宇宙機を地球脱出軌道に投入することで、彫刻作品を深宇宙へと送りだす(深宇宙彫刻の実現)
- 芸術家の分身として深宇宙に送りだした宇宙機から、詩を生成し電波として送信する(宇宙生成詩の遠隔創造)
- 技術ミッション
- 多くのアマチュア無線家の協力による深宇宙からの微弱な電波の共同受信実験(共同受信ミッション)
- 3Dプリンタ造形物の宇宙機搭載実証と一般の宇宙機への応用
なお、芸術ミッションの「宇宙生成詩」とは、宇宙機搭載のセンサーの値(温度など)をもとに宇宙機搭載の計算機が特定のアルゴリズムにもとづいて生成するものである。
また、技術ミッションに挙げた「共同受信ミッション」では世界各地のアマチュア無線家に受信協力をいただくことで、宇宙生成詩の復元に挑戦する。
宇宙生成詩および共同受信ミッションに関する詳細は、共同受信ミッションのページを参照のこと。
特徴
こうしたミッションを実現するために、DESPATCHは通常の宇宙機とは異なる、以下のような特徴を有している。
- 宇宙機が電波を連続送信する期間は、地球脱出軌道に投入後、地球から約300万kmの距離に到達するまでの最大一週間とする
- 電源は一次電池のみとし太陽電池を搭載しないことで、造形作品としての宇宙機の外観の自由度を高める
- ペイロードが自律的に機能するため、通信はCWビーコンの送信のみとし地上からのコマンドアップリンクは行わない
構造とデザイン
DESPATCHの構造は、大きく以下の3つの部分からなる。
- 宇宙機全体を覆うような造形部(Sculpture)
- データ処理用のOBCと通信機および1次電池を収納するアルミニウム製容器(Aluminum Cover)
- 造形部を支持しアンテナを据え付ける棒状部材(Support rod)
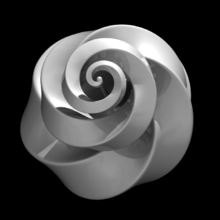
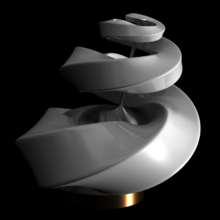
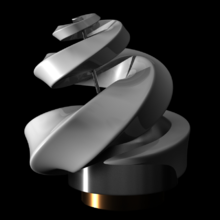
外観のデザイン
構造系のうち造形部については、 ロシア・アヴァンギャルドの芸術家ウラジーミル・タトリンが1919年に構想した「第三インターナショナル記念塔(The Monument to the Third International)」や、 ロバート・スミッソンによるランドアートの先駆的な作品である「スパイラル・ジェティ(Spiral Jetty)」を参照・引用し、 「螺旋」をモチーフに造形のスタディを行った。螺旋は芸術作品のみならず、生命や自然の中にも多く見られる普遍的な形である。いくつかの試行錯誤の結果、最終的な造形は、以下のような特長を持つ下図のものに決定した。
- 視点の位置によってさまざまな表情の変化が生まれる
- アルゴリズミックな形状とオーガニックな風合いを融合する
造形部はCADでデザインされ3Dプリンタによりナイロンから出力されたものであり、重量はおよそ15kgと宇宙機の重量の約半分を占める。 3Dプリンタによる造形は、SOLIZE株式会社が担当した。
以下のページでは、DESPATCHの3Dモデルをドラッグ/スクロールで操作し、様々な角度から宇宙機の多様な外観をみることができる。
- CGによるDESPATCHの外観



- DESPATCHのフライトモデル(実物)の外観





構造設計と機器配置
宇宙機の内部構造は下図に示すとおりである。 DESPATCHの構造設計においては、その外見だけではなく内部構造も美しく設計することを目標とした。 DESPATCHの構造は従来の宇宙機や衛星に多く見られるパネル・フレームの構造とは異なり、 中央のアルミニウム製支柱(Aluminum Keel)を大黒柱とした周方向に対称な構造(および機器配置)になっている。 このような周方向に対称な構造によって、振動や荷重に対する強度に方向性がない、工学的な観点からも非常に強い構造を実現している。


造形部(Sculpture)の材質はナイロン12であるが、その強度は他の金属部品と比べると弱いため、
造形部とアルミニウム製容器(Aluminum Cover)は合計17本のボルトでとめられ力が分散する構造となっている。
アルミニウム製容器は基本的に曲面となっているが,そのボルト締結部においてはナットを平面で支えるために17箇所1つ1つに特殊加工によって平面が設けられている。
また、造形部を支える棒状部材(Support rod)は、打ち上げ時の振動やロケットからの分離衝撃に耐えうる荷重・振動特性等を考慮し、材料(GFRP)やその太さが選定されている。
この棒状部材は支持部材であると同時に、モノポールアンテナの取り付け場所としての役割を持つ。
これらの構造設計および製作は株式会社由紀精密に協力をいただいた。
電気的な構成


通信系
DESPATCHのメインミッションである共同受信ミッションを成功させるためには、なるべく多くのアマチュア無線家の受信協力が必要となる。 そこで、送信電波の周波数としては、アマチュア衛星で最も一般的に使用され、より局数の多い430MHz帯を採用している。
変調方式としては最もシンプルな方式であるCW(搬送波のオン/オフで、1ビットを表現)を採用し、 複雑な変調方式の電波を低出力で送るのではなく、できる限りシンプルな変調方式の電波をできる限り高出力で送ることによって受信の確実性を高めるという設計としている。 また、シンプルな変調方式を採用する副次的な効果として、なるべく多くの方に共同受信に参加していただけるようにするだけでなく、受信の際に各局で独自に工夫を凝らすことが比較的容易であるため、地上局の多様性を利用した異種冗長化を図れると考えている。
このような設計にしたがって、以下に示す諸元の送信機を宇宙機に搭載する。 この送信機は、株式会社西無線研究所によって設計・開発されたものである。
| 送信機出力 | 7 W |
| 送信周波数 | 437.325 MHz |
| 変調方式 | CW |
| 電源電圧 | +7V DC |
| 消費電力 | 最大 24.5 W |
| 周波数安定度 | 最大 ±0.3ppm (±130 Hz) |
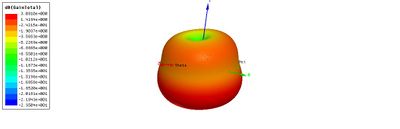
この送信機は宇宙機搭載のタイマーICと計算機によって駆動され、およそ7Wの送信電力がモノポールアンテナから放射される。 シミュレーションによって求めたアンテナパターンを図に示す。 なお、このアンテナは、造形部の中心に配置されたGFRP製の棒状部材に取り付けられており、 棒状部材は造形部の先端と通信機等が格納されているアルミニウム製の容器とを接続している。
- DESPATCHのアンテナパターンおよびそれを規定する座標系




参考として、この送信系とARTSATプロジェクトの地上局での回線計算の結果を、以下のファイルに記載した。
なお、このCW送信機によって送信するデータの具体的な形式については、以下のページを参照されたい。
投入軌道
DESPATCHは地球脱出軌道に投入され、ちょうど地球の横を並走するような人工小惑星となる。 その軌道は下図に示すとおりであり、打ち上げからおよそ1年ごとに地球に最接近する。 なお、図に示した緑色の軌道は、DESPATCHが相乗りする小惑星探査機はやぶさ2の目標天体(小惑星1999JU3)の軌道である。


地上から観測するとき、DESPATCHは他の惑星と同様に数時間かけてゆっくりと天球上を移動する。
以下のウェブページで、DESPATCHの現在位置を確認できる。
リンク
- ARTSATプロジェクト公式HP
- SNS
- GitHub

連絡先
info@artsat.jp